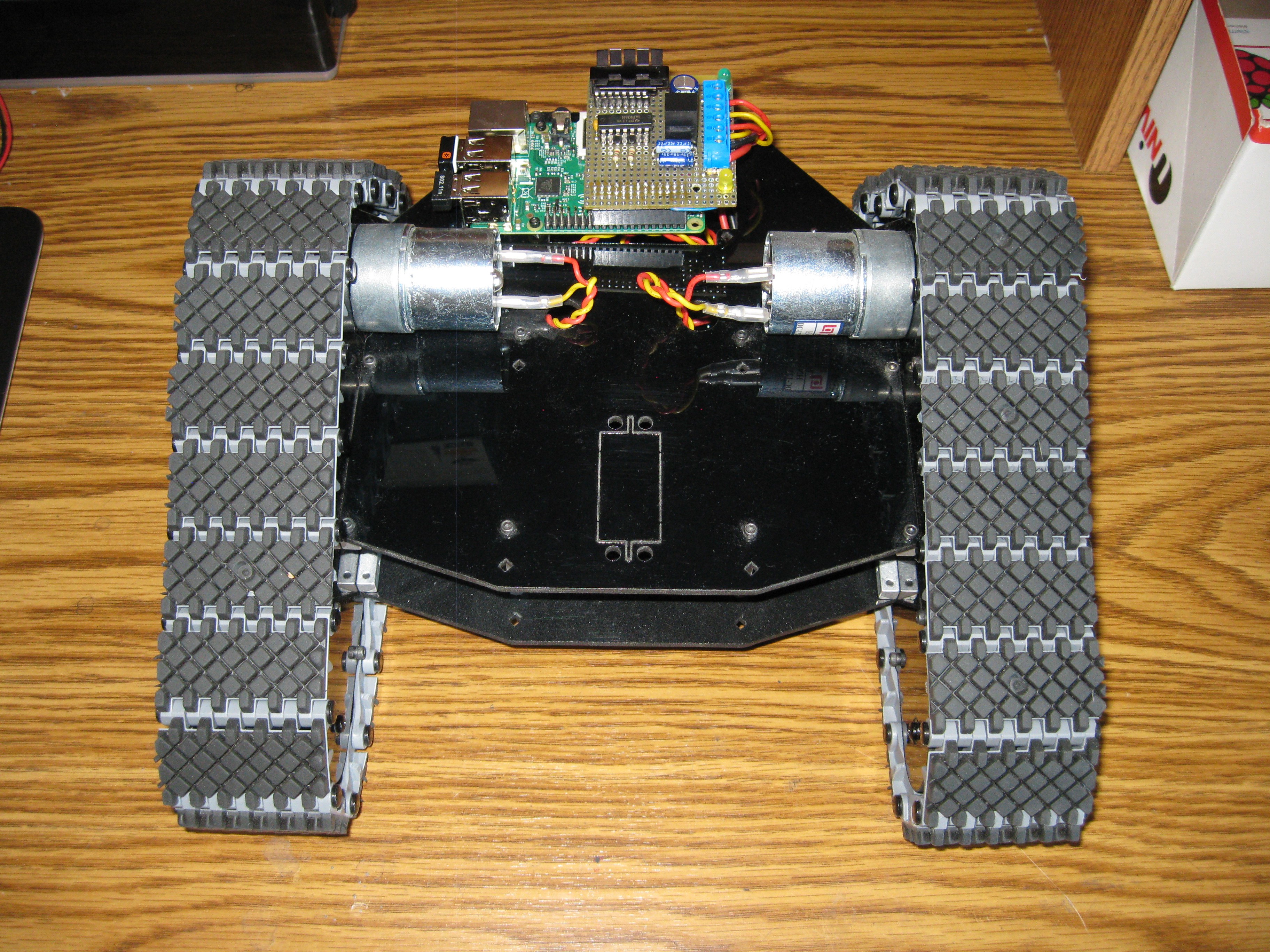
I am working on this project with my 13 year old son. We have a nice Lynxmotion tracked robot base and are controlling it with a Raspberry Pi. I built an interface board that has a high current driver for the motors and a five volt switching power supply to power the Pi from the robot’s 12 volt battery. For now it uses a wireless keyboard as a remote control, but we have a camera and some ultrasonic sensors that we intend to incorporate into the project soon. We also plan to add a Lynxmotion arm and gripper to complete the project. A simple Python program reads the wireless keyboard and switches the appropriate motors on or off when the arrow keys are pressed. Later software updates will use the camera and Open CV software to detect objects and pick them up.




